SeaHawk/HawkEye ▸ Geolocation
The Hawkeye sensor has a ground resolution of about 120 meters, equivalent to an angular resolution of .0125 degree. However, the pointing for the Seahawk spacecraft cannot be determined at this level. The attitude sensors on the spacecraft are the fine Sun sensors (FSSs), three-axis magnetometers (TAMs) and rate gyros. The best information is provided by the FSSs, with an accuracy of about 0.1 degree. The TAMs are significantly less accurate, between 1 and 2 degrees, and the gyros have a noise level of about 0.1 degree/second.
In addition, the attitude data embedded with the images is limited to slightly longer than the image duration, about 2 minutes. The net effect of these factors is that while the spacecraft pointing relative to the Sun direction can be determined to better than 0.1 degree, the rotation about that direction will have a bias of typically 1 degree or more. Given the spacecraft orbit, the Sun direction is on average about 25 degrees from the orbit plane, so a rotation about that direction has components in all three pointing angles (roll, pitch and yaw). While roll and pitch errors can be corrected by shifting the image to align with coastlines, yaw errors result in a skew in the image that is not readily corrected.
Because of the uncertainty in the ability to automatically compute an accurate geolocation for each of the HawkEye images using the onboard attitude information, we have decided to employ a method that we developed to correct similar geolocation issues that we found with the HICO data that our group also supports. Repurposing this web-based tool allows us to project each HawkEye image onto a world maps and then manually slide the image in both the along-track and across-track direction with the goal of trying to match as much of the coastline that is visible in the image with the projected coastline that the tool has drawn. Unfortunately, any residual yaw motion that the spacecraft experienced during the period is unable to be removed at this time.
The along-track offset that we compute is based on interpreting the offset as a time shift between the time reported in the image and the time needed to make the image line up with the map. The offset that we derive uses an average speed that the spacecraft travels of 7.6 km per second and approximately 10.26 km per degree of roll. For the 275 Hawkeye scenes that have been collected and manually geolocated since 16 April 2021, average along-track offset that needed to be applied as determined by time was -0.95 seconds or 7.22 km and the average across-track offset that needed to be applied as determined by roll -1.24 degree or 12.73 km. The calculated offsets are then used by the production system to renavigate the images and update the navigation stored in the distributed Level-1a files and when processing the images to Level-2 either for the products distributed by us or when processed by people using SeaDAS. This process produces images that while significantly better geolocated than the original, uncorrected images, still results is portions of the image where unresolved spacecraft motion is not accurately aligned with the computed coastline.
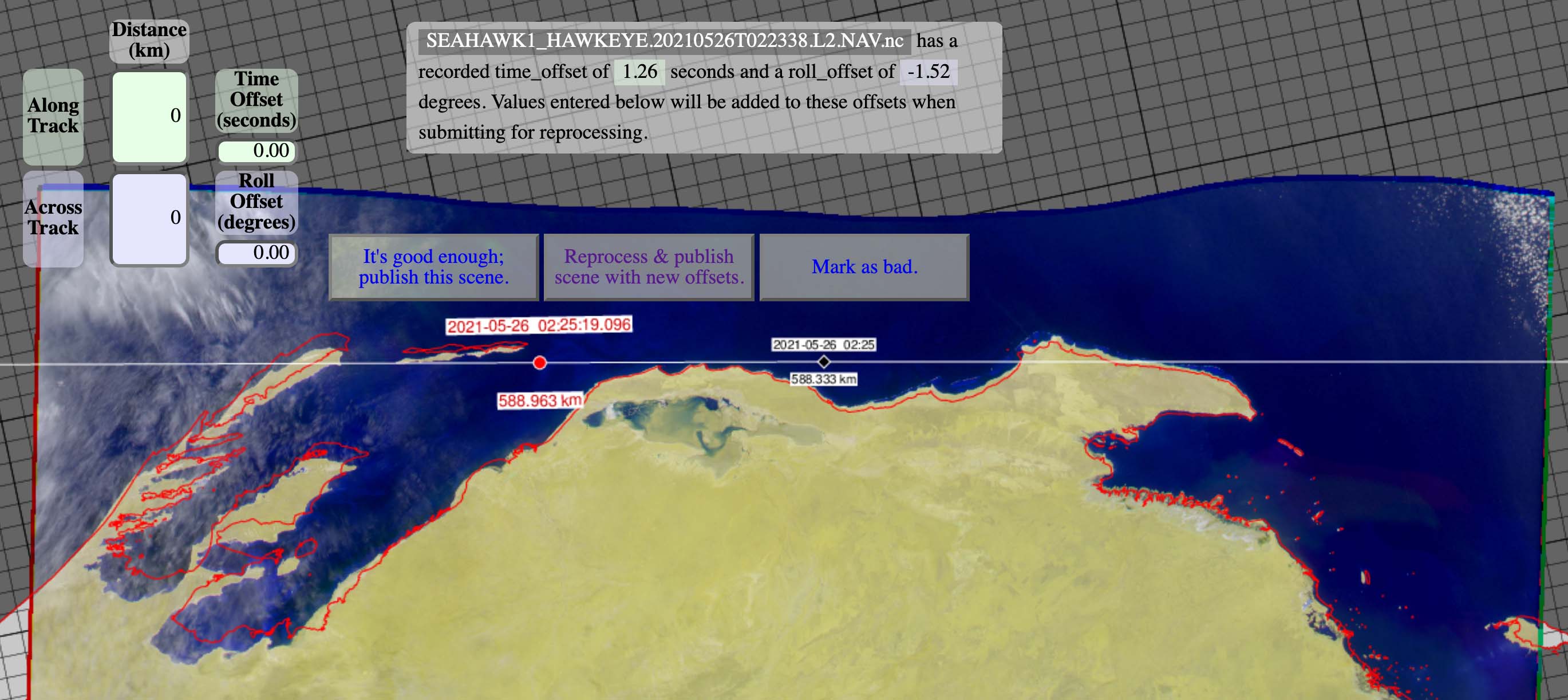
Below are screenshots of our web-based renavigation tool of the two recent HawkEye images showing the coast of Southeast Alaska near Juneau and the northwest coast of Australia. You can see in both cases that while there are parts of the images for which the alignment between the coastline observed in the images and that computed by the tool is quite good, that there are portions of the image where that is not the case. This is due to the fact that we are applying a single along-track and across track offset to entire image where in reality, there are probably numerous smaller corrections that would need to be made that are well below our current ability to accurately resolve them as was described in the opening section of this discussion. We are working on additional improvements to the geolocation and when we feel confident that we can verify that they are doing what we hope, we will reprocess the data set as appropriate.